Автор: quanyu lee
2024-12-13 07:49:59
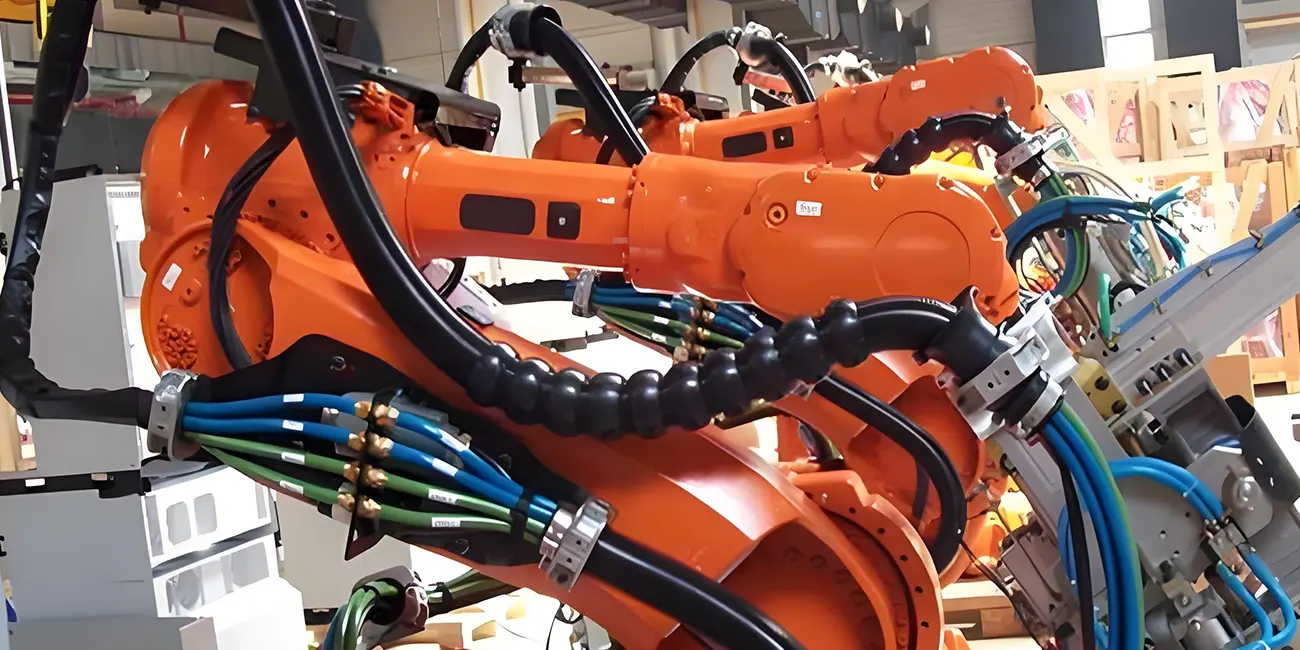
Руководство по выбору гибкого кабельного жгута для робототехники: как выбрать, как протестировать и как продлить срок службы
В промышленных роботах, высокоскоростных сортировочных машинах, коллаборативных роботах и автоматизированных производственных линиях срок службы жгутов проводов часто определяет стабильность всей системы. Обычные жгуты проводов быстро стареют или даже рвутся при длительном изгибе, возвратно-поступательном движении кабельной цепи, кручении и ударах с ускорением. В отличие от них, гибкие роботизированные кабельные жгуты специально разработаны для этих высокоинтенсивных условий работы, сохраняя структурную устойчивость и целостность сигнала даже после миллионов циклов.
Предположим, вы ищете решение для жгутов проводов для роботизированных манипуляторов, направляющих, шарнирных осей или высокоскоростных динамических систем. В этом случае это руководство поможет вам полностью понять ключевые аспекты жгутов проводов роботов, устойчивых к изгибу, включая материалы и структуру, а также методы выбора.
I. Что такое роботизированный гибкий кабельный жгут?
Гибкий кабельный жгут для робота — это электрическое межсоединение, разработанное для высокодинамичных сред. Он обычно включает в себя проводники, кабели, изоляционные слои, экраны, буферные материалы, разъемы и дополнительное механическое усиление. По сравнению со стандартными жгутами он обеспечивает:
1. Высокая износостойкость
Спроектирован так, чтобы выдерживать миллионы, а иногда и десятки миллионов, циклов изгиба, например, U-образные петли кабельной цепи.
2. Сопротивление кручению
Способен выполнять повторяющиеся крутящие движения, часто ±180° на метр и более, что имеет решающее значение для вращающихся сочленений робота.
3. Армирование на растяжение и удары
Кевларовые волокна, многослойная буферизация или механические конструкции для снятия натяжения помогают предотвратить разрыв проводника при натяжении или ускорении.
4. Экранирование от электромагнитных помех и электромагнитной совместимости
Роботизированная среда содержит сильные электромагнитные помехи от сервоприводов и инверторов. Для обеспечения надёжности сигналов необходимо надёжное экранирование.
5. Долговечные материалы для жилетов
К ним относятся PUR, TPE и высокоэффективный ПВХ, оптимизированные для обеспечения маслостойкости, износостойкости и высокой гибкости.
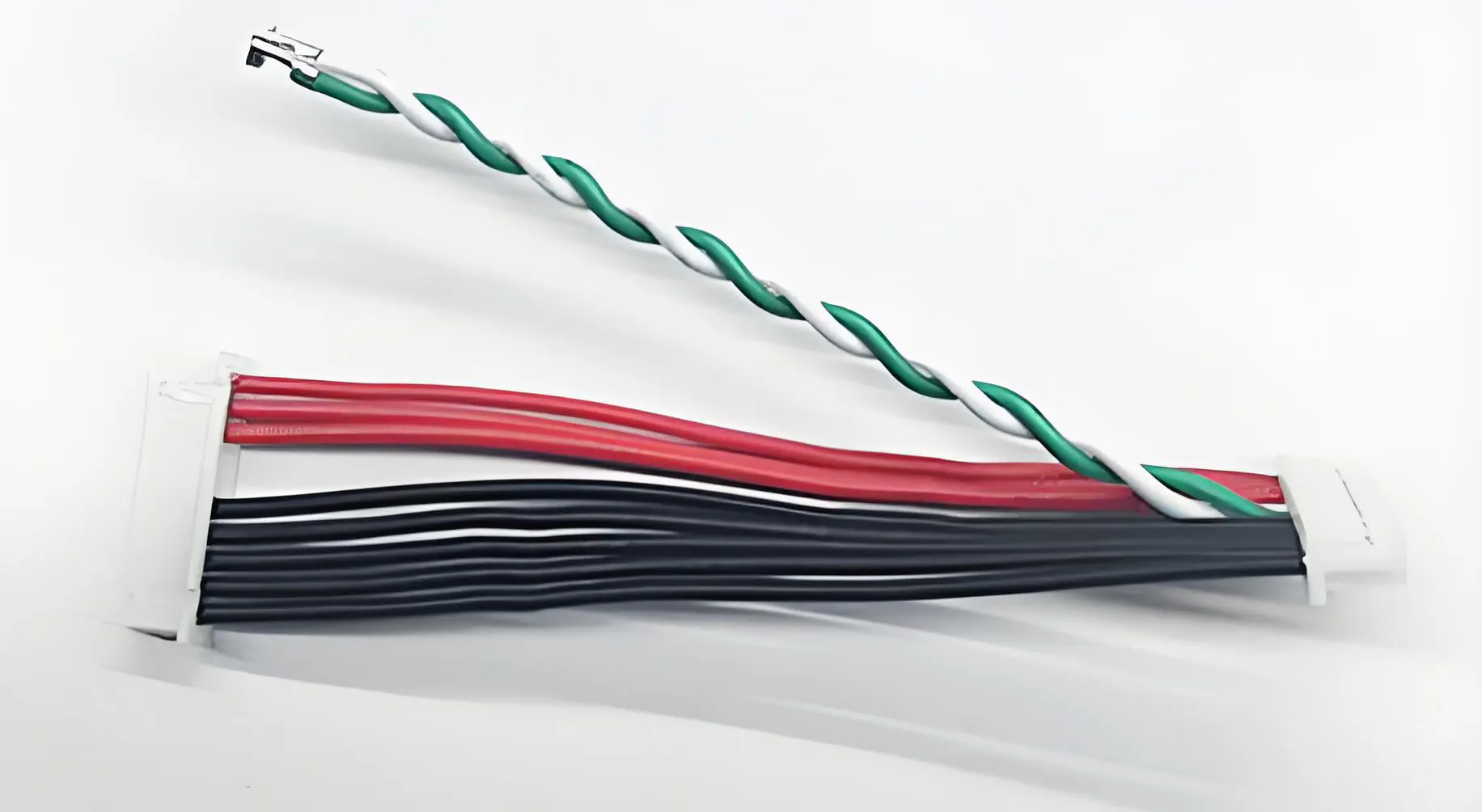
2. Основные структурные элементы гибкого кабельного жгута робота
Для обеспечения долговечности и стабильности в роботизированных системах используются специализированные внутренние конструкции:
1. Сверхтонкие многожильные проводники
Чем тоньше жилы, тем гибче проводник.
- Типичный диаметр: 0,05–0,1 мм
- Преимущество: значительное увеличение срока службы и гибкости.
2. Многослойная буферная система
Между проводником и оболочкой устанавливаются буферы, такие как:
- гибкие наполнители
- плетеные слои ПЭТ
- ленты с низким коэффициентом трения
Они помогают уменьшить внутреннее трение и предотвратить концентрацию напряжений.
3. Варианты экранирования
В зависимости от области применения:
- Оплетка из луженой меди
- Композитный материал: алюминиевая фольга + оплетка
- Непрерывное экранирование на 360°
Необходим для кабелей энкодеров, линий связи с шинами и чувствительных сигналов.
4. Материалы куртки
Разные материалы подходят для разных сред:
| Материал | Особенности | Применения |
| PUR | Высокая гибкость, масляная, износостойкая | Промышленные роботы тяги цепи |
| TPE | Устойчив к низким температурам, экологичен, мягок | Коботы |
| Высококачественный ПВХ | Эффективный с точки зрения затрат, средняя гибкость | Стандартная автоматизация |
3. Как выбрать правильный гибкий кабельный жгут для робота
Выбор кабеля для робота — это не просто проверка его «мягкости». Он должен соответствовать реальным условиям эксплуатации.
1. Определите тип движения
Различные движения создают различные напряжения:
| Тип движения | Ключевые требования | Пример оборудования |
| Изгибание цепи с помощью перетаскивания | Высокий срок службы гибкости, низкое трение | Робот будет управлять кабинетом |
| Движение скручивания | Выносливость на торсирование + прочность на растяжение | Коботы, 6-осиные роботы |
| 3D соединенное движение | Гибридная гибкость + специальная зацепка | SCARA, роботы Delta |
2. Подтвердите требования к электроснабжению
В состав роботизированных жгутов часто входят:
- Кабели питания
- Кабели энкодера
- Шины связи (EtherCAT, CAN, RS-485)
- Кабели серводвигателей
- Линии сигналов ввода/вывода
Ключевые проверки:
- Постоянство импеданса
- Непрерывность экранирования
- Конфигурация, изолирующая чувствительные сигналы
3. Условия окружающей среды
Учитывать:
- Диапазон температур (например, от −40 °C до +80 °C)
- Воздействие смазочно-охлаждающей жидкости или промышленных смазочных материалов
- Механические удары или вибрации
- Требования к чистым помещениям
4. Качество разъемов и концевых соединений
Типичные концевые заделки жгутов робота включают в себя:
- Круглые разъемы M12/M23
- Интерфейсы сервоэнкодеров
- Разъемы, изготовленные по индивидуальному заказу
- Конструкции клемм с защитой от натяжения
Большинство неисправностей возникает вблизи разъемов, поэтому качество заделки имеет решающее значение.
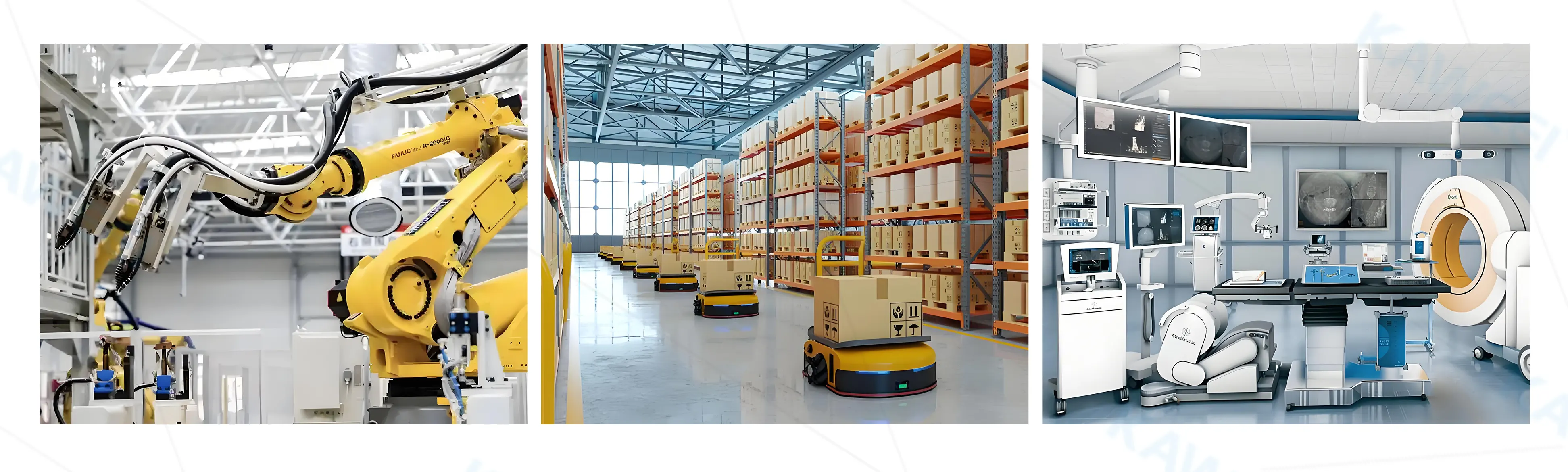
4. Распространенные сценарии применения
Гибкие жгуты для роботов широко используются в:
- 6-осевые промышленные роботы (сварка, погрузка-разгрузка, паллетирование)
- Коллаборативные роботы
- Высокоскоростное сортировочное оборудование
- Системы лазерной резки и распыления
- 3D-печать и прецизионная автоматизация
- Платформы медицинской автоматизации
- Полупроводниковое оборудование
Любой сценарий, требующий непрерывного движения, микропозиционирования или высокочастотных динамических задач, должен использовать специальные роботизированные кабельные жгуты.
5. Как определить, является ли кабельный жгут действительно «гибким»?
Стандартные отраслевые испытания включают:
1. Испытание на прочность при изгибе
- Изгиб U-образной формы с нагрузкой и скоростью.
- Проверено более чем 1 000 000 циклами.
2. Испытание на кручение
- Многократное скручивание, например, на ±180° или ±360°
- Проверка распределения напряжений во вращающихся соединениях.
3. Испытание на прочность тяговой цепи
- Высокоскоростное, высокочастотное движение на большие расстояния.
4. Климатические испытания
- стойкость к соляному туману
- стойкость к маслу
- стойкость к температурному шоку
- стойкость к истиранию
Всегда требуйте от поставщиков:
- кривая срока службы
- параметры динамических испытаний
- спецификация материалов (спецификация)

6. Распространенные ошибки и как их избежать
Ошибка 1: использование обычных кабелей управления вместо кабелей робототехнического класса
Результат: потеря сигнала или обрыв проводника в течение нескольких недель.
Ошибка 2: Отсутствие резерва длины движения
Создает сильную нагрузку на разъемы.
Ошибка 3: Игнорирование электромагнитных помех
Вызывает шум энкодера, дрожание сервопривода и потерю связи.
Ошибка 4: Неправильный выбор материала куртки
Например, ПВХ быстро разрушается в маслянистых средах.
Ошибка 5: Неправильный зажим или фиксация
Неправильная прокладка или завязывание могут привести к «задушению» кабеля во время движения.

7. FAQ: Распространенные вопросы о гибких кабельных жгутах для роботов
1. Каков срок службы гибкого кабельного жгута робота?
В зависимости от конструкции и материалов срок службы составляет от 1 000 000 до более 20 000 000 циклов.
Если вам требуются прочные индивидуальные жгуты для высокоскоростных роботов, компания WIRE HARNESS ASSEMBLY может разработать усиленные решения, оптимизированные под ваш конкретный радиус изгиба, угол скручивания и траекторию движения.
2. Является ли долговечность при кручении более важной, чем долговечность при изгибе?
Да, особенно для 6-осевых роботов, сопротивление кручению часто является основным фактором.
3. Могут ли кабели для буксируемых цепей заменить кабели робота?
Нет. Кабели для кабельных цепей не рассчитаны на многоосное скручивание или сложное движение.
4. Требуется ли индивидуальная настройка кабельных жгутов робота?
Для большинства приложений требуются индивидуальные решения, поскольку длина, пути маршрутизации и разъемы различаются в зависимости от оборудования.
5. Как продлить реальный срок службы кабеля?
- Правильная прокладка
- Гибкие зажимы и компенсаторы натяжения
- Избегание изгиба меньше минимального радиуса
- Высококачественные разъемы и формовка
8. Заключение
Гибкий кабельный жгут для робота — это не просто «мягкий кабель», а высокотехнологичный компонент, предназначенный для сложных динамических условий, который должен обеспечивать длительный срок службы при изгибе, высокую устойчивость к скручиванию, надежное экранирование, оптимизированную формулу материала и надежную концевую заделку. Правильный выбор может значительно повысить надежность, сократить время простоя и продлить общий срок службы системы, будь то создание высокоскоростной производственной системы или оптимизация прокладки кабелей для коллаборативного робота.



